撰稿 | 颜悦(香港中文大学,博士生)
物理学家Dennis Gabor 因发明全息术被授予1971年诺贝尔物理学奖。全息术是一种可以记录光波前(包括其幅度和相位)并重建的技术,其主要利用光的衍射来产生虚拟三维图像。
先驱者们在很早就预言全息是实现完美3D 显示的最终方法,这是因为全息术是目前可满足适配人类视觉系统光学要求的唯一方法。多年以来,研究者们都在为实现这一目标不断努力。
近期,来自美国亚利桑那大学光科学学院的Pierre-Alexandre Blanche教授在最新一期的 Light: Advanced Manufacturing发表一篇题为"Holography, and the future of 3D display” 的综述文章。
首先,阐述了为什么目前实现全息3D 显示是一项艰巨的挑战;随后,从人眼视觉系统出发,介绍了目前主流的3D 显示技术及其特点;随后,以全息3D 显示为重点,总结了利用机器学习和神经网络算法实现实时全息计算的新进展;
最后,介绍了全息数据硬件生成方法及其进展。
一、为何全息3D 显示是一项艰巨的挑战
为了直观地描述全息3D 显示的难度,作者使用数据传输速率(比特率,b/s)作为衡量指标。
假设实现一个45°视场,60Hz 刷新率,8位分辨率,50cm×50cm屏幕大小的全息彩色显示,在所使用光源为500nm情况下,所需要的比特率约为3×1015b/s。
图1 展示了全息和其他通讯技术所需的数据速率(按发展时间顺序排列)对比情况。
1798年的摇臂信号机大约每分钟可传输2~3个符号,约0.4bit/s。1840年代开始流行以莫斯码传输的电报,大约为100b/s。1876年,电话的出现可以开始传输声音信号,传输速率在64kb/s。1940年代出现的黑白电视可显示29.97帧/s的视频,传输速率达26Mb/s。1950年代开始出现的彩色电视传输速率又提高三倍,达78Mb/s。1990年代开始出现数码视频,HDTV 720p 所需速率达1.33Gb/s。2010年代出现4K 高清 HDTV 2160p所需传输速率达12.7Gb/s。
最新的8K 高清则需要47.8Gb/s的传输。(注:以上所需传输速率为压缩前的数据量)而全息3D 彩色显示比特率是8K 高清的6万倍,所以实现全息3D 显示的难度显而易见。
图1:通向全息之路:随着时间推移,不同通讯系统所需比特率
按照图1中的发展时间轴预测,实现商业化的全息3D显示大约要到2100年。发展轨迹或许不是无法改变的,所有的这一切取决于人类的不断努力。尽管实现难度非常大,但全息仍然被认为是实现3D 显示的终极技术。这是因为全息术是目前可满足适配人眼视觉系统光学要求的唯一方法。
二、人眼视觉和3D 显示
理解人眼视觉系统是如何感知三维信息对研发3D显示至关重要。
人眼视觉系统从外部获取的众多信息中来进行深度感知,而其中绝大多数重要的深度感知要素是二维信息,其中包括阴影(shading + shadowing),透视方向(perspective),相对大小(relative size),遮挡(occlusion),模糊度(blurriness + haze)。
如下图2展示了在一个二维平面上的三个球,但其包含了以上列举的二维深度感知要素,这些二维深度感知要素经过人眼视觉系统后,我们会认为它们是存在于三维空间中的球。所以无论是绘画,照片,或是影像,只要上面的二维深度感知要素被植入,我们人眼就会产生三维感知效果,否则光学图像错觉就会产生。因此3D 显示系统首先需要保证以上二维深度感知要素,其次再加入和解决其他一些三维感知要素,如立体视差,运动视察和视觉辐辏调节冲突(vergence-accommodation conflict,VAC)等等。
图2:二维深度感知要素及其对深度感知的影响
基于以上信息,作者讨论了目前主要的几种3D 显示技术及其特点:
- 基于立体视差(Stereo disparity):常见于现在3D影院,需要穿戴3D眼镜,存在VAC。
- 裸眼3D 显示(Autostereoscopy):常用透镜阵列实现光场三维成像;需要用户固定在特定位置,存在VAC。
- 基于运动视差 (Motion Parallax,Multiview):相当于用户可移动的裸眼3D,存在VAC,所需比特率低,约10⁵ Gb/s,也是目前研究的热点。
立体显示(volumetric displays):通过预先定义好的三维空间进行光发射,散射,照明以显示三维图像。图像就像悬浮在空中,给人以极大的视觉冲击。但存在遮挡问题,且成像体积受到限制。
以上这些3D 显示技术各有利弊及其适用的应用场景,且很多受到人眼视觉系统限制而无法解决。但这些技术在最终全息术成熟之前,仍将继续向前为朝着用户体现更舒适,显示效果更佳的方向继续前进。全息术被证明是目前唯一可满足所有人眼视觉系统所需要素的3D 显示技术。但其挑战是巨大的,主要从三个方面阐述:
1. 全息3D信息计算(computation)
计算机数字全息(Computed Generated Holograms, CGH)的出现极大地推动了全息计算的发展。利用基尔霍夫和菲尼尔衍射理论计算由相位板在特定衍射距离上产生任意图像。但是1015b/s 级别(720p video)的数据比特率需求让计算变得庞大且耗时。而这需要更为简洁的全息计算算法,并且对应的针对全息计算的特定硬件平台也非常必要。
2. 全息信息传输(transmission)
因为超大的数据传输需求,建立有效的数据传输网络模型,无失真的衍射数据压缩算法非常重要。
3. 全息信息更迭生成(reproduction)
为了生成高质量的全息图形,以3×1015b/s 比特率为例,大概需要23万个4K 空间光调制器(SLM),15000台电脑来处理对应的数据,这些听起来很荒唐的数字再一次体现了全息3D显示的实现难度之大。全息数据生成器件和方法通常可分为以下几类:
- 硅基集成的液晶调制器(liquid crystal on silicon,LCoS SLM):分辨率高,但液晶的刷新速率低。
- 微机电系统(MEMS):刷新率快,高集成度,但目前器件效率低。德州仪器处于领先地位,其下一代的高效率的相位调制器也正在研发。
- 研发可实时刷新的全息材料:比如光折变聚合物,声光材料。
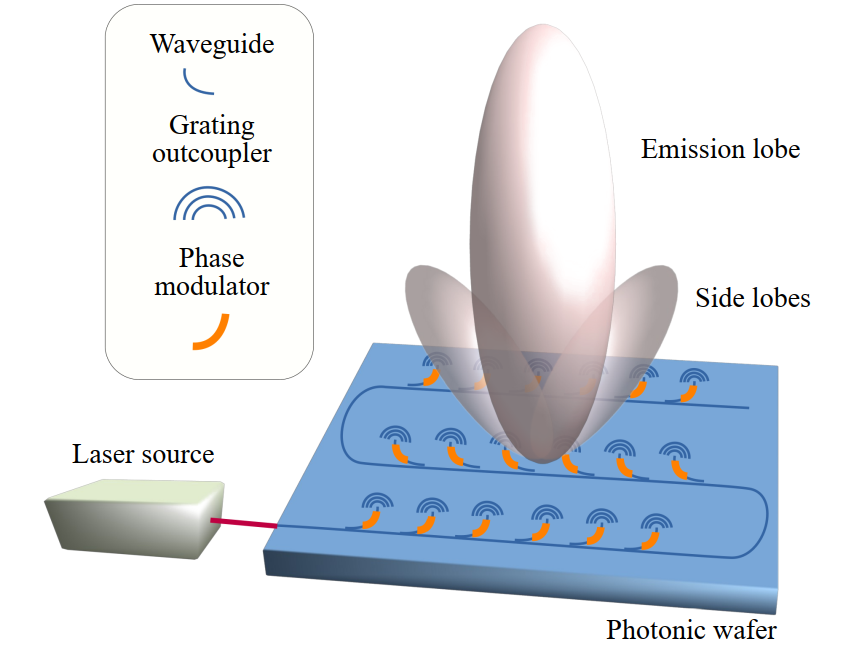
相位阵列光子集成芯片:微纳尺度的相位阵列由一系列光波导组成并实现晶圆尺寸的大规模集成。如图3,这些相位阵列通过片上的声光或热光调制器来改变其相位,并用光栅耦合出射。其优点是快速,相位易控制,片上大规模集成。缺点是相位分辨率较低,导致有较大的衍射旁瓣。
目前还没有哪一个技术可以同时满足高分辨,高数据量生成且集成度高的需求。全息仍被认为是实现理想3D 显示的最终技术。虽然目前还没有成熟完善的解决方案,但这无法掩盖人们为其所做出的巨大贡献,科学家们正前所未有地将项技术变成现实。
论文信息
Blanche. Light: Advanced Manufacturing (2021)2:28https://doi.org/10.37188/lam.2021.028









.jpeg)



